

安川机器人的 “信号预约处理”(通常称为 “信号预约功能”)是指通过程序或系统设置,预先定义信号(输入 / 输出信号、总线信号等)的触发条件、执行逻辑或状态切换规则,实现信号的自动化、时序化控制,常用于复杂工序中的信号协同(如与 PLC、外围设备的分步交互)。以下是基于安川主流控制器(如 DX200、YRC1000)的信号预约处理核心内容整理,可作为操作参考手册:
一、信号预约处理的核心目标
二、信号预约的主要类型及适用场景
| 信号类型 | 预约处理方式 | 典型场景 |
|---|---|---|
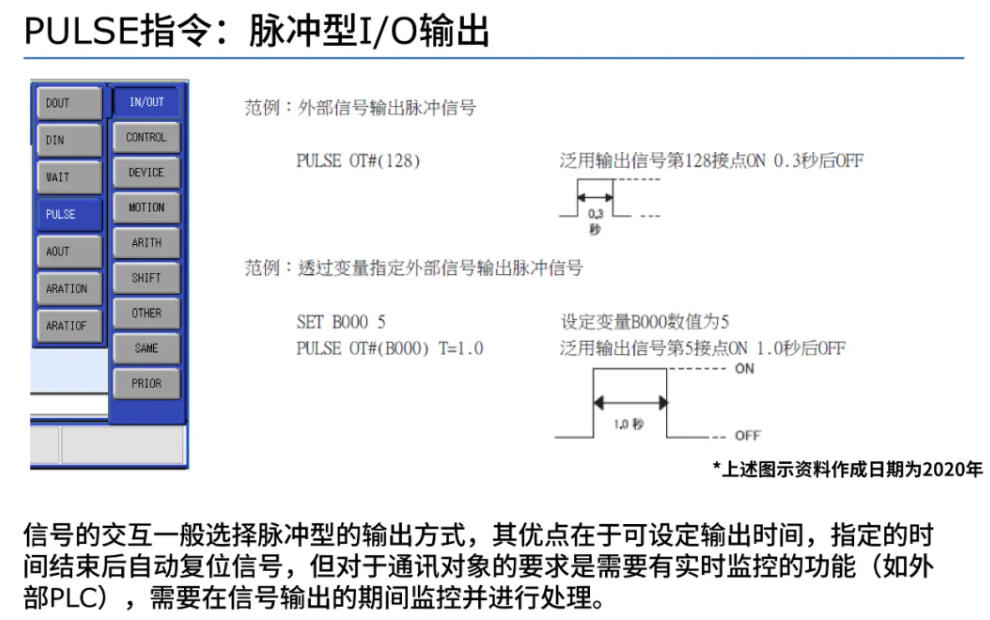
| 物理 I/O 信号 | 程序指令预约、定时预约 | 抓手动作分步控制、输送线启停时序 |
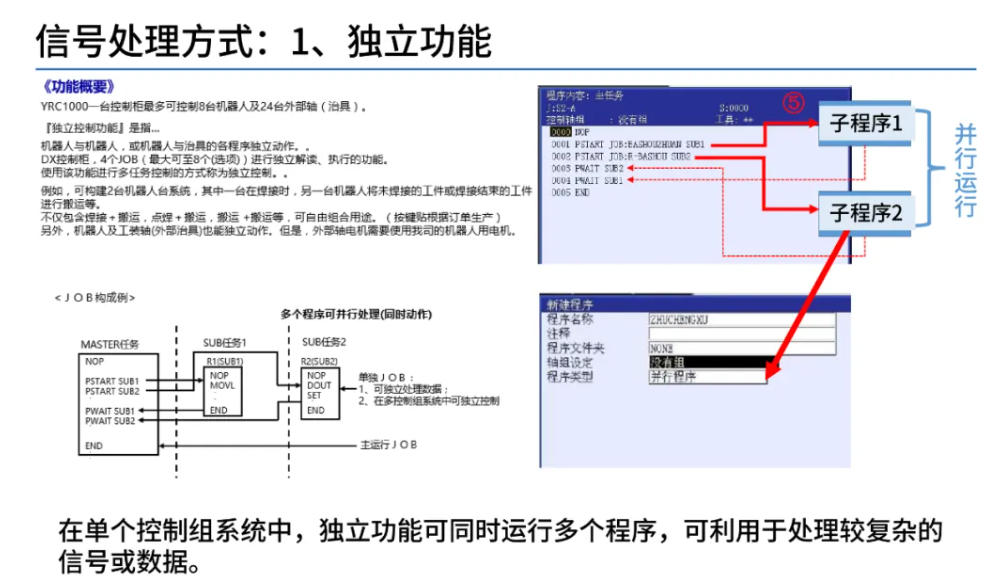
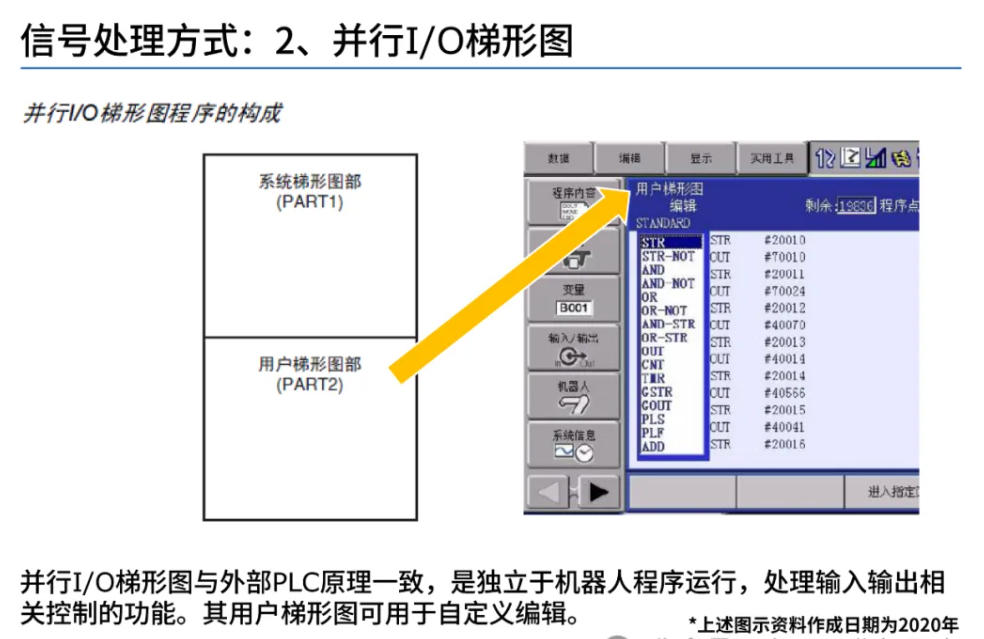
| 总线信号(如 EtherCAT/Profinet) | 数据帧预约、同步周期预约 | 与 PLC 的分步数据交互(如 “先发送位置数据,再请求下一步指令”) |
| 系统状态信号 | 事件触发预约(如报警、模式切换) | 报警时自动输出故障代码、模式切换时同步状态反馈 |
| 自定义变量信号 | 变量阈值预约(如计数器达标、位置达标) | 计数满额时输出提示信号、到达指定位置后触发检测 |
三、信号预约处理的设置步骤(以 DX200 控制器为例)
1. 基础预约:通过程序指令实现信号时序预约
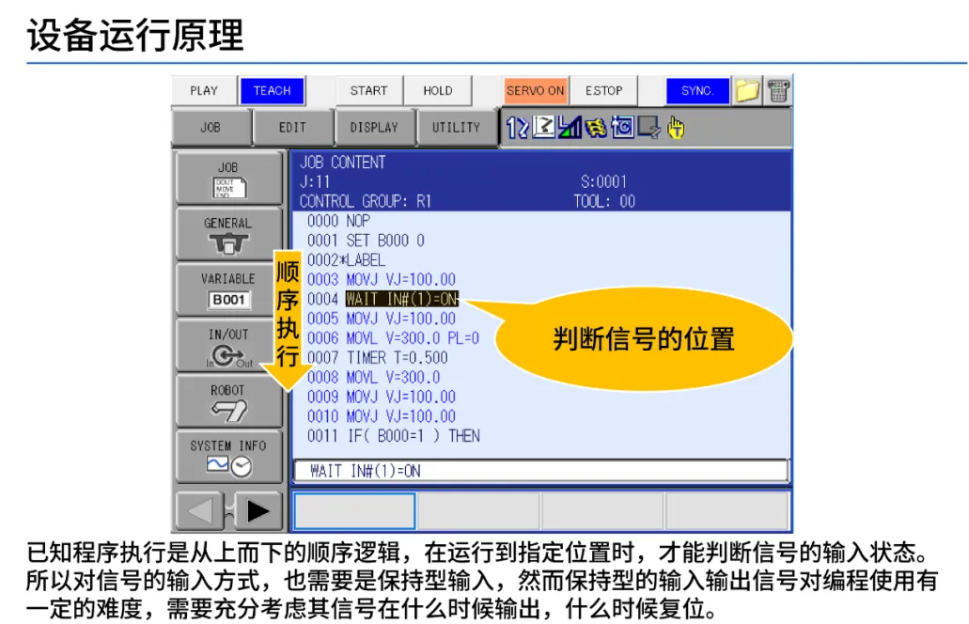
适用于简单的 “条件 + 时间” 触发逻辑,直接在机器人作业程序(JOB)中通过指令定义预约规则。核心指令:
示例:工件抓取的信号预约流程
plaintext
; 流程:检测到工件到位(DI10=ON)→ 预约抓手打开(DO11=ON)→ 等待0.5秒 → 预约抓手闭合(DO11=OFF)→ 输出完成信号(DO12=ON) J P1 100% FINE ; 移动到抓取点上方 WAIT DI10=ON ; 等待工件到位信号(预约触发条件) DOUT DO11, ON ; 预约抓手打开(满足条件后执行) WAIT 0.5 ; 预约延迟0.5秒(确保抓手完全打开) DOUT DO11, OFF ; 预约抓手闭合 WAIT 0.3 ; 等待闭合完成 DOUT DO12, ON ; 预约输出“抓取完成”信号
2. 高级预约:通过系统功能实现事件触发预约
适用于需关联系统状态或外部事件的自动预约(无需手动编程触发),通过控制器的「信号预约设置」界面配置。
操作路径:示教器主菜单 → 「I/O」→ 「信号预约」→ 选择信号类型(DI/DO/ 总线信号)→ 配置触发条件与执行动作。
关键参数设置:
示例:报警时自动预约输出故障信号
3. 总线信号预约:基于通信周期的同步预约
适用于通过现场总线(如 EtherCAT)与外部设备的实时协同,需在总线配置中定义信号的发送 / 接收周期及同步规则。
设置要点:
